



Home > Research > Research Overview > 2015 > Faculty of Engineering

Yuichi Tsumaki
Professor
Mechanical Systems Engineering
Graduate School of Science and Engineering (Engineering)
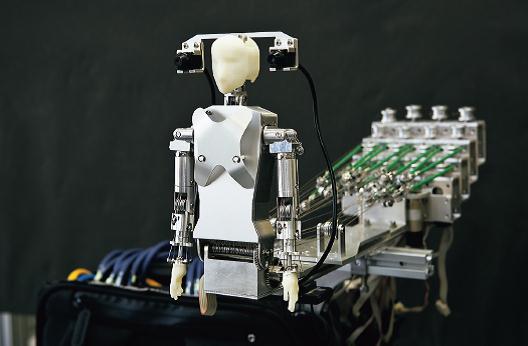
▲A telexistance system composed of a wearable miniature humanoid robot
Telerobotics is an academic field related to the control of robots from a distance. With telerobotics technologies as the basis, we execute research on robots that will reinforce person-to-person communication as well as robots that will play an active role in the deep seas or in outer space.

▲The environment driven mobility system for the asteroid exploration robot onboard Hayabusa-2
When traveling afar on your own, have you ever wanted to share the awe that you are feeling and other experiences with family and friends? We are developing a wearable miniature humanoid robot to make this kind of wish come true. It is the development of telexistence technology that creates real-time sensations that allow you to stay at home yet feel as if you are actually at a different location.
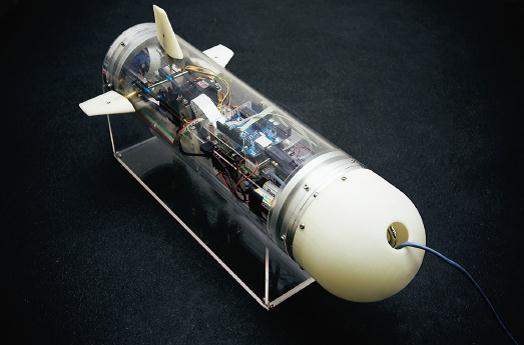
▲Underwater telexistence system for observation of dolphins
Hayabusa-2 was launched in December 2014 with four small exploration robots onboard. One of them was developed by a consortium of several universities. It is equipped with four different mechanisms that will provide mobility even in an atypical environment that has a surface gravity only one one-hundred-thousandth that of Earth. We proposed a new concept—an environment driven rover—and were involved in the development of one of the units. We are also developing an underwater robot for videotaping sperm whales preying on giant squid in deep waters.
