



Home > Research > Research Overview > 2025 > Soft Mechanisms Using Artificial Muscles
Assistant Professor(Department of Engineering)
TOMORI Hiroki
At the Tomori Laboratory of Yamagata University, we are advancing the development of soft actuators for robotics. The "pneumatic rubber artificial muscle" we developed consists of rubber and fiber materials, and when compressed air is introduced, it exhibits strong contraction forces ranging from hundreds to thousand of Newtons. Furthermore, it is lightweight (several tens of grams), flexible, and excels in waterproofing and quiet operation. However, challenges arise in controlling due to pneumatic response and material deformation. In our laboratory, we propose control methods based on theoretical models and work on improving artificial muscles.
In terms of applied development, we are creating robotic arms that can safely interact with objects and waterproof assist suits for agricultural use. The assist suit, in particular, features a new structure that maximizes flexibility by positioning artificial muscles along the surface of the wearer’s body, achieving a fit and comfort similar to that of a garment. During development, we conduct surveys to incorporate user feedback into our designs and aim to provide the necessary technologies for society.
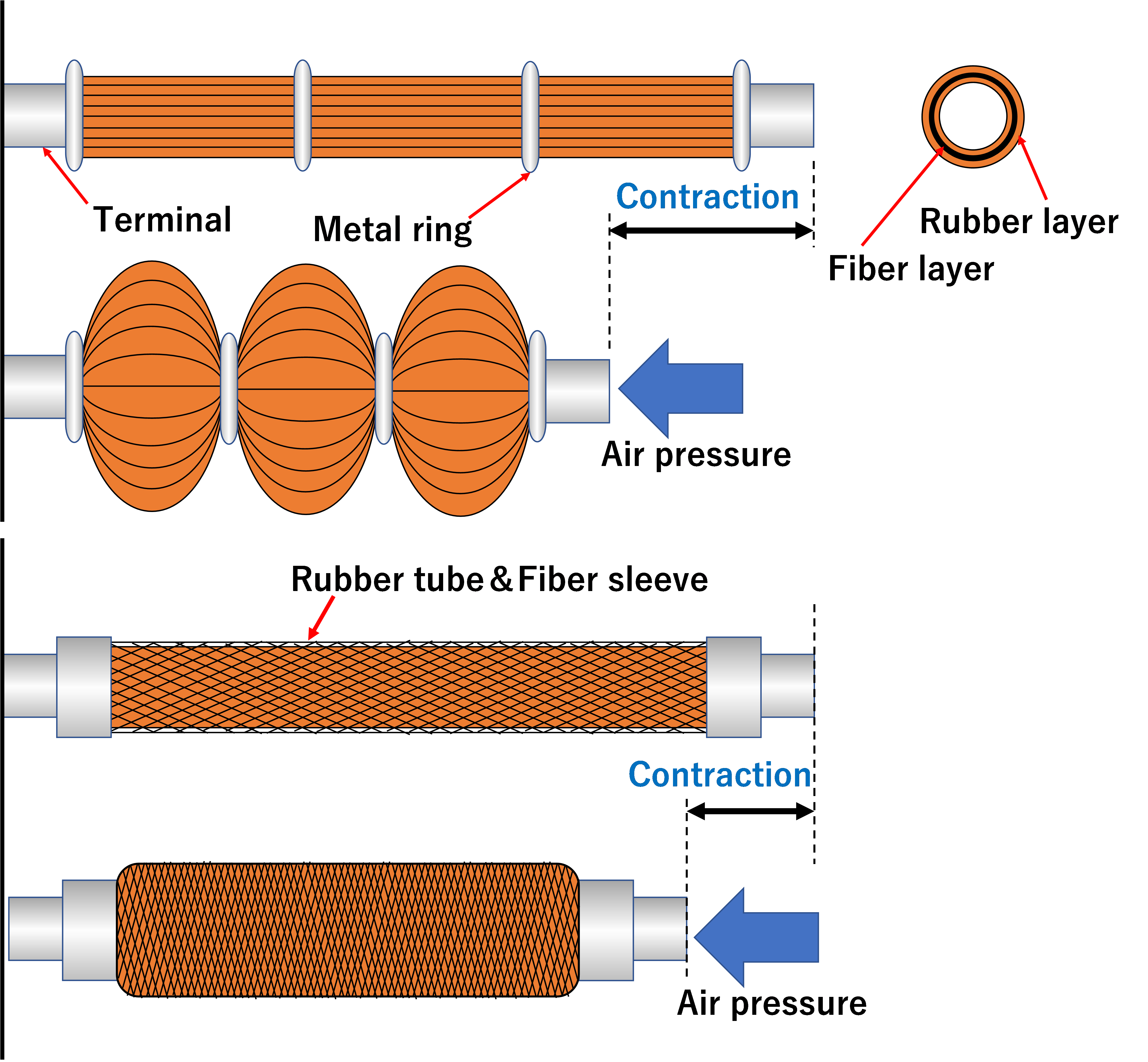
▲Straight-Fiber-Type Artificial Muscle (top) and McKibben-Type Artificial Muscle (bottom) Used in the Laboratory

▲Robot Arm with Antagonistic Muscle Joint Structure Using Straight-Fiber-Type Artificial Muscle

▲Agricultural Power Assist Suit Using McKibben-Type Artificial Muscles
Related Links
